Stepper Motor Step Angle Formula
SRMs produce more audible noise than stepper motors. Figure 15 shows one tooth per pole.

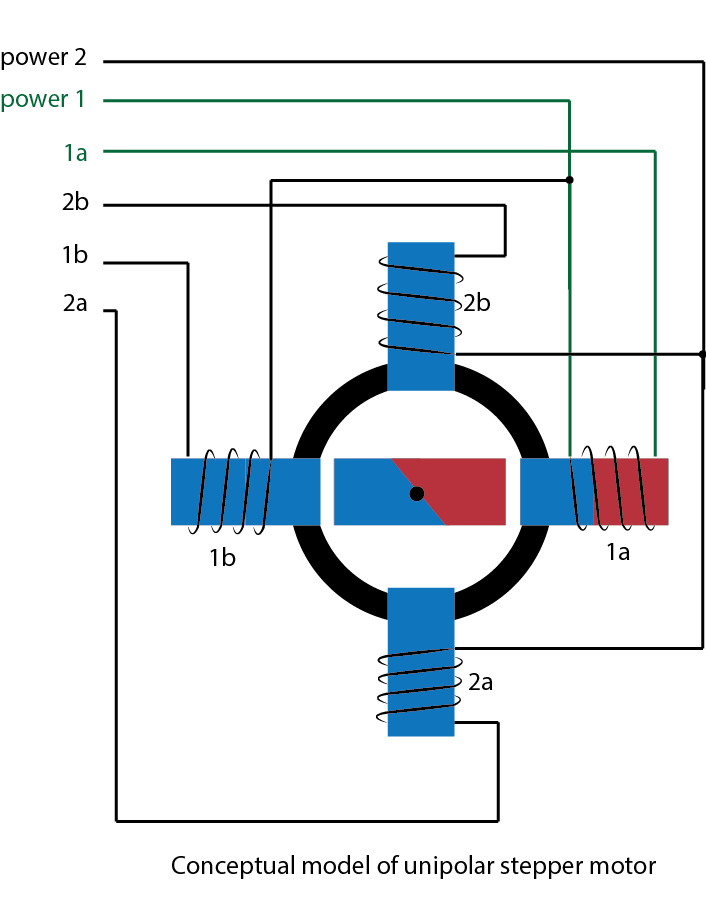
Bipolar Stepper Motor What Is It Circuit And Sequence Electrical4u
Since I have an 1 amps stepper motor the formula is.
. What is a Bipolar Stepper Motor. The step angle of the stepper motor can be defined as the angle at which the motors rotor turns once a single pulse is given to the stators input. Common Formula for All Motors.
The step angle of the VR type stepper motor is represented in the following formula. This means you have to make 200 steps to make a complete 360-degree turn 18 200. You can find further information on minimising step losses the implementation of the redundancy principle in a miniature stepper motor and the facts and myths on micro-stepping operation in our stepper motor tutorials.
The type of step mode output of any stepper motor is dependent on the design of the controller. A stepper motor also known as step motor or stepping motor is a brushless DC electric motor that divides a full rotation into a number of equal steps. The rated voltage is 34V and the current per phase is 17 Amps.
For finer resolutions its effective to increase of the number of teeth of the rotor. The main formula expressing the behavior of the motor is given by equation 1. However use the formulas below when calculating the acceleration torque for stepper or servo motors on the basis of pulse speed.
With these formulas Klipper can determine the ideal time that the stepper should. Steps per Revolution This is the number of step angles required for a complete revolution. Klipper uses an iterative solver to generate the step times for each stepper.
The resolution of the motor can be defined as the number of steps. As an example a common rating for a stepper motor is a 18-degree step angle. It is also a function of the current rating and the coil resistance and you can use Ohms Law to calculate one from the other.
VREF 04V 400mV The second step was to find out the Vref location on the breakout board. SA 36020 18 The step angle may be calculated directly without knowing the number of phases if the number of stator teeth and teeth per pole are known. Potential Flow Rate Max Torque.
2D stepper driver version using a L293 driver and 2 mm magnet pushing 500 mA at 3V. This parameter is used to determine the positioning of a stepper motor. Step Angledegrees18 Phase2.
Some parameters of stepper motors. Stepper motor-An efficient alternative to stable revolution is the step angle revolution that can be provided by stepper motors. I search on the Internet and I found the location.
The code contains the formulas to calculate the ideal cartesian coordinates of the head at each moment in time and it has the kinematic formulas to calculate the ideal stepper positions based on those cartesian coordinates. 30 minutes rated In the case of a reversible motor the allowable winding temperature is reached around 30 minutes. SPR steps per revolution.
Bipolar stepper motors usually use one winding per phase because the current in the winding can be made to circulate in both directions. Where step integrity and high resolution are important. An ideal stepper motor would have zero mechanical friction its torque would be proportional to ampere-turns and its only electrical characteristic would be.
However if the number of stator slots are also increased the structure becomes very complicated to manufacture. This measurement condition is specified under the condition that the. But motor will not run continuously- it holds the position while powered.
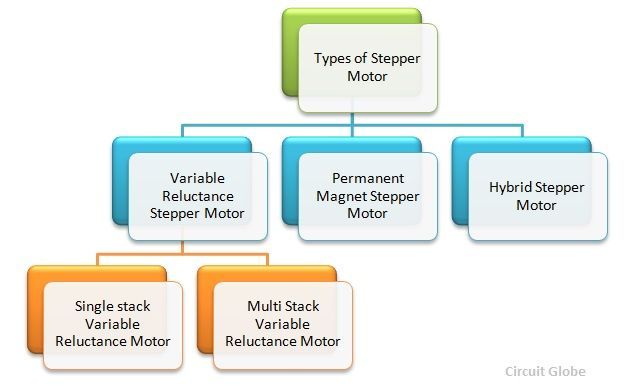
Phase poles and step angle Usually stepper motors have 2 phases but some of them may also have 3 or 5 phases. Simply the voltage rating of the motor coils. So now as you.
SA step angle in degrees. Step Angle The step angle is the angle in which the rotor moves when one pulse is applied as an input of the stator. Stepper motors can be rotated to a specific angle in discrete steps with ease and hence stepper motors are used for readwrite head positioning in early disk drives where the precision and speed they offered could correctly position the readwrite head.
Stepper motor step modes include Full Half and Microstep. We are aware that the rotation angle of any rotor is 180 degrees. The power input to the motor is the product of the motor current and the applied voltage.
To help understand why a step motors power is independent of speed we need to construct figuratively an ideal step motor. The motors position can then be directed to move and hold at one of these steps without any position sensor for feedback an open-loop controller. Omegamation offers stepper motor drives with switch selectable full and half step modes as well as microstepping drives with either.
MOSFET version 3 sets of unipolar-driven coils per dimension rather than 2 sets of bipolar H-bridge driven coils. Microstepping Myths and Realities. The degree of temperature rise changes depending on the ambient environment.
Np is the number of teeth of a rotor and Nphase is the number of phases. At around 10 of the motor stall torque maximum efficiency is reached. The image below shows a.
H rated peak temp 180. Typically selecting a motor based on the total required torque and max required speed is a safe bet even though the motor may not need that torque at its max speed. Keep it cool enough to touch.
The Model number of this Bipolar stepper motor is 42BYGH40-18-22A. Therefore reversible motors are 30 minutes rated. The motors position can be commanded to move and hold at one of these steps without any position sensor for feedback an open-loop controller as long as the motor is correctly sized to the application in respect to torque and.
A stepper motor is a brushless DC motor that divides a full rotation into several equal steps. The step angle may be found from the following formula. When calculating the Acceleration Torque for Stepper or Servo Motors on the basis of pulse speed.
Some applications of stepper motors include generators plotters fabrication of. As drive density increased precision and speed limitations made them obsolete for hard drivesthe precision limitation. 18 is the Step Angle in degrees.
However the rated time is just a guide. In stepper motors however this rotation angle is divided into a number of steps like 9 steps of 20 degrees. The basic formula is the same for all motors.
Step angle is usually 18 degrees. There are two basic motion profiles. It is the center point of the potentiometer.
The number of full steps per revolution may be determined from the following formula. Check out this excellent video on youtube which. SRMs have a closedloop control system while steppers have specific steps and operate without the use of feedback and in an open loop.
This motor has both salient pole stator and rotor like a variable reluctance stepper motor. Implementation of Redundancy in a Miniature Stepper Motor. Miniatur Wunderland has been developing the technology for six years in an effort to build a 21 m long scale model of a Monaco Formula 1 race.
To use the LGX run the stepper motor with currents between 045 and 065A. 1 VREF x 25 in case of A4988 VREF 1 25. Bipolar stepper motors are a type of stepper motor with a single winding per phase and no.
The motor moves exactly one small predefined angle called a step each time coils in motor get excited. The stepper motor parameters mainly include step angle steps for each revolution steps for each second and RPM. This means motor torque is the inverse of motor speed.
Since the torque produced by a stepper motor decreases as speed increases you will need to look at the speed-torque curve to determine if the stepper motor will work at that speed or not. Stepper Motor Technical Note. So the formula is.
A little bit of oversizing. Max Torque at. The four wires of the stepper motor are provided with pins which I am going to cut and I will solder female headers so that I can easily interface the stepper motors with the CNC Shield.
Be vigilant regarding the stepper motor surface temperature. Calculate the step angle for the above motor. As there are 360 degrees in a full rotation this is equivalent to 200 steps per revolution 18 x 200 360.
Unipolar stepper motors use one winding. Plan to run each stepper motor at between 50 and 85 of its rated current. Unless you will be using external stepper motor drivers choose motors with rated current of at least 12A and at most 20A for the Duet 06 and Duet 085 3A for the Duet 2 7A for Duet 3 main and expansion boards and 17A for Duet 3 tool boards or Duet 2 Maestro.
The efficiency of the motor is defined as the mechanical power output divided by the electrical power input at each calculation step.
Stepper Motor Basics Openlabpro Com
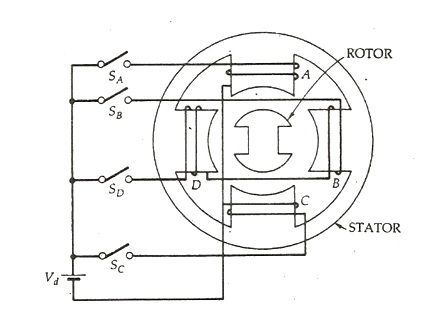
Variable Reluctance Stepper Motor Its Working Circuit Globe
Stator And Rotor Design Of Stepper Motors A Two Phase Download Scientific Diagram

What Is A Stepper Motor And How Does It Work Realpars
What Is A Stepper Motor Step Angle Advantages Disadvantages Circuit Globe
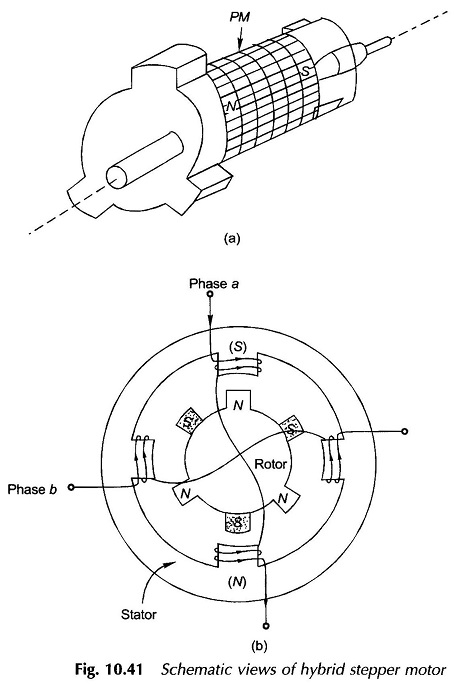
Hybrid Stepper Motor Construction And Working Eeeguide Com

Specifications Of The Stepper Motor Download Table
Stepper Motor Basics Openlabpro Com

Steps Per Revolution And Step Angle In Stepper Motors Faqs Engineering And Component Solution Forum Techforum Digi Key
0 Response to "Stepper Motor Step Angle Formula"
Post a Comment